|
|
|
|

|
|
|
|
|
|
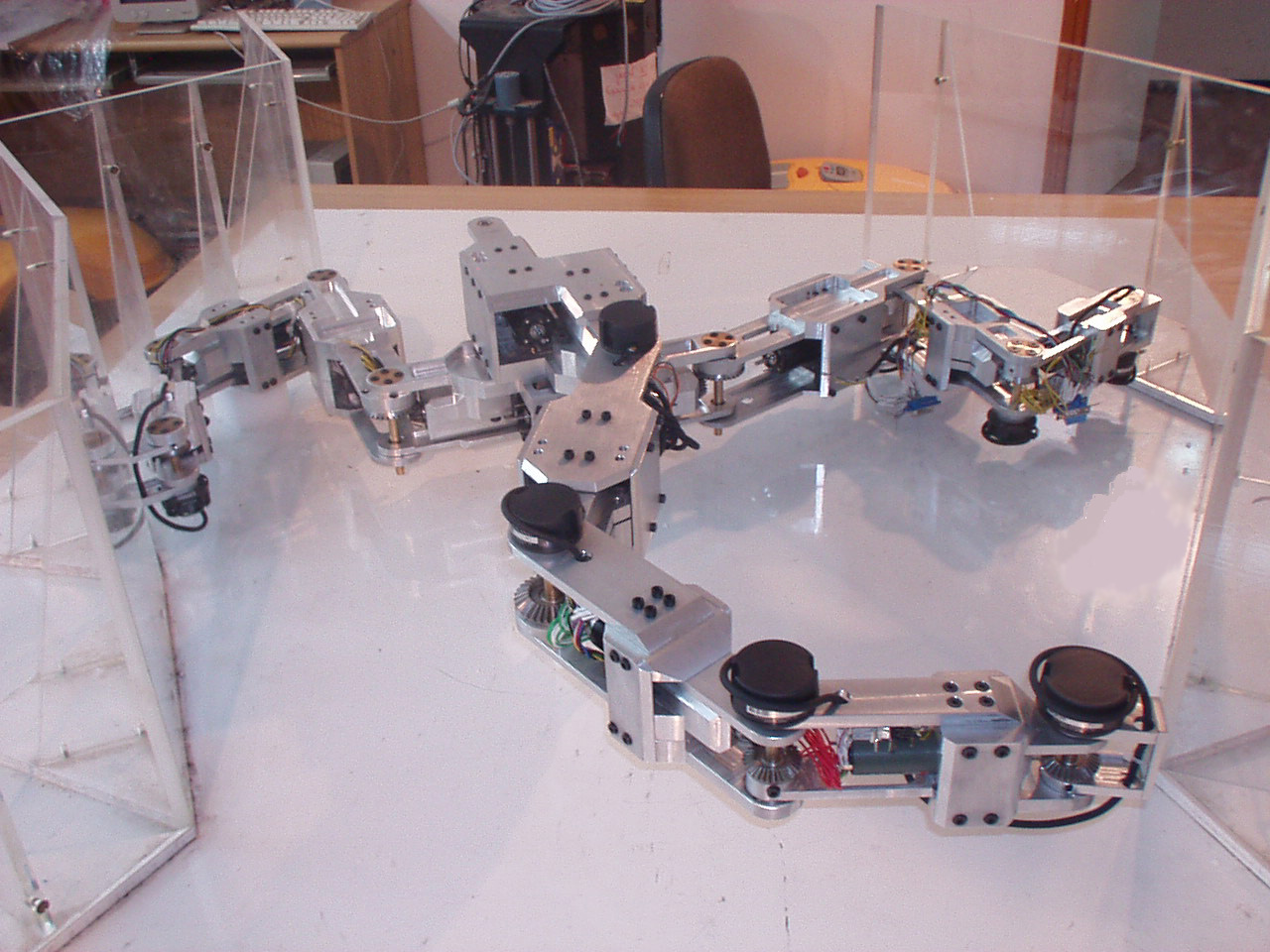
First generation of 4-limbed planar spider robot for motion in slippery 2D horizontal tunnel environments |
|
|
|
|
|
|

|
|
|
|
|
|
First generation of 4-limbed planar spider robot for motion in slippery 2D horizontal tunnel environments |
|
|
|
|
|
|
|

|
|
|
|
|
|
First generation spider-robot with me |
|
|
|
|
|
|

|
|
|
|
|
|
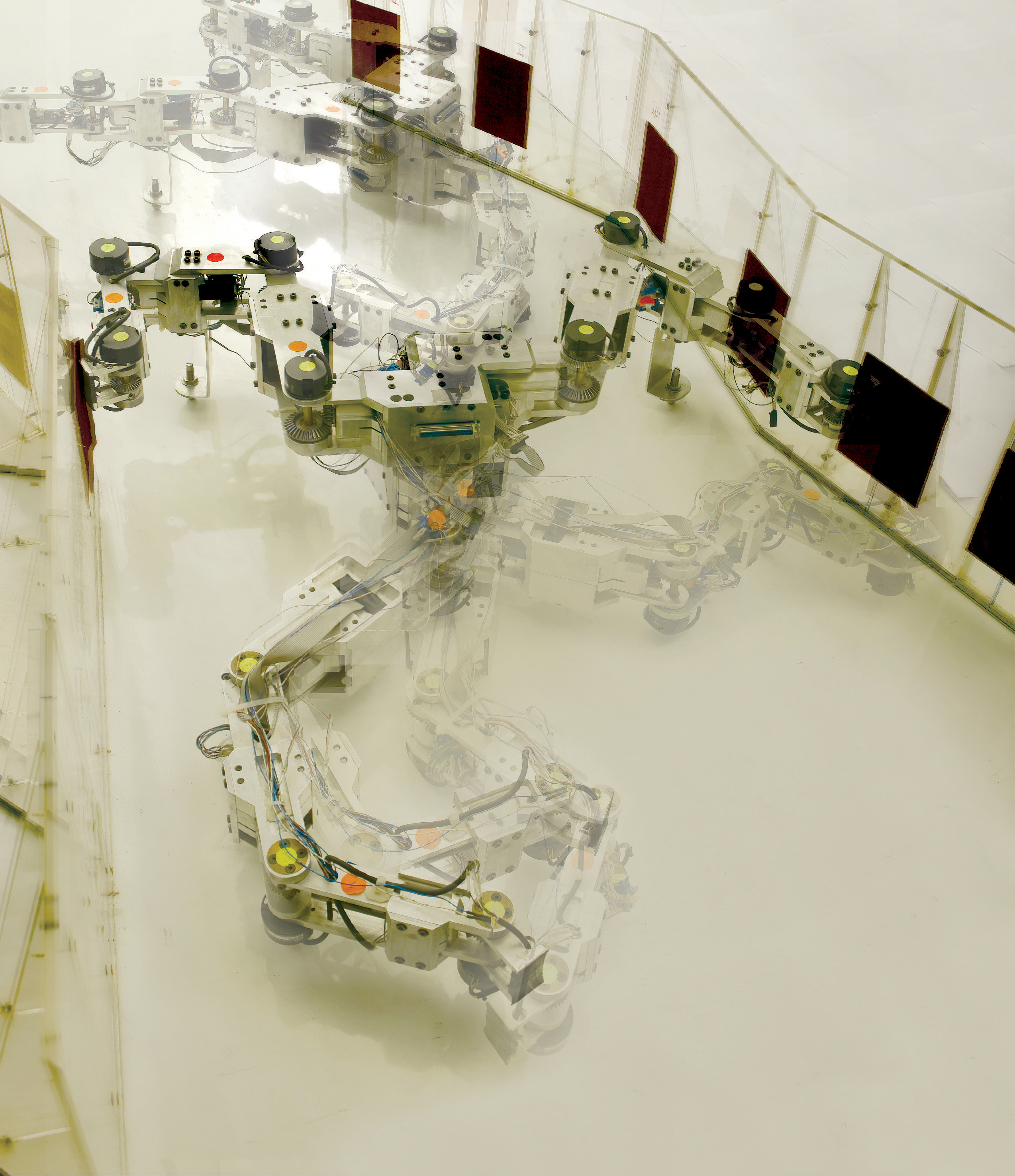
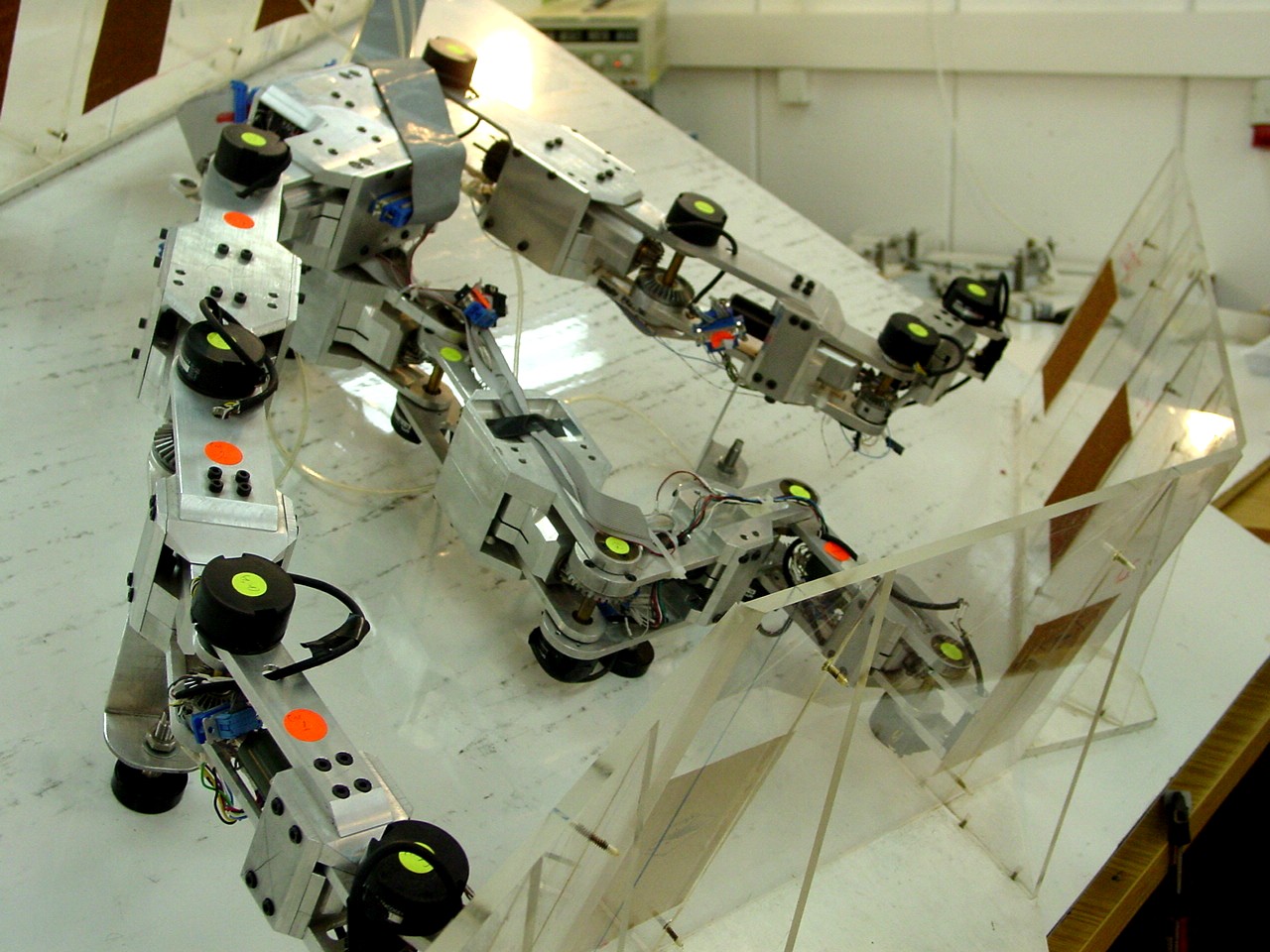
Second generation of 3-limbed planar spider-robot for motion in 2D horizontal tunnel environments using frictional contacts |
|
|
|
|
|
|
|

|
|
|
|
|
|
Second generation of 3-limbed planar spider-robot for motion in 2D horizontal tunnel environments using frictional contacts
|
|
|
|
|
|
|

|
|
|
|
|
|
Artistic picture of the 3-limbed spider-robot |
|
|
|
|
|
|
|

|
|
|
|
|
|
The 3-limbed spider-robot with me in spiderman position |
|
|
|
|
|
|

|
|
|
|
|
|
The 3-limbed spider robot move under gravitational field effect |
|
|
|
|
|
|
|

|
|
|
|
|
|
The Technion's prototype robot for the Robocup games |
|
|
|
|
|
|

|
|
|
|
|
|
The Technion's prototype robot for the Robocup games
|
|
|
|
|
|
|
|

|
|
|
|
|
|
The Technion's prototype robot for the Robocup games
|
|
|
|
|
|
|

|
|
|
|
|
|
The Technion's prototype robot for the Robocup games without its cover
|
|
|
|
|
|
|
|

|
|
|
|
|
|
The Technion's prototype robot for the Robocup games without its cover |
|
|
|
|
|
|

|
|
|
|
|
|
Drawing of the glider robot |
|
|
|
|
|
|
|

|
|
|
|
|
|
picture of the glider robot
|
|
|
|
|
|
|

|
|
|
|
|
|
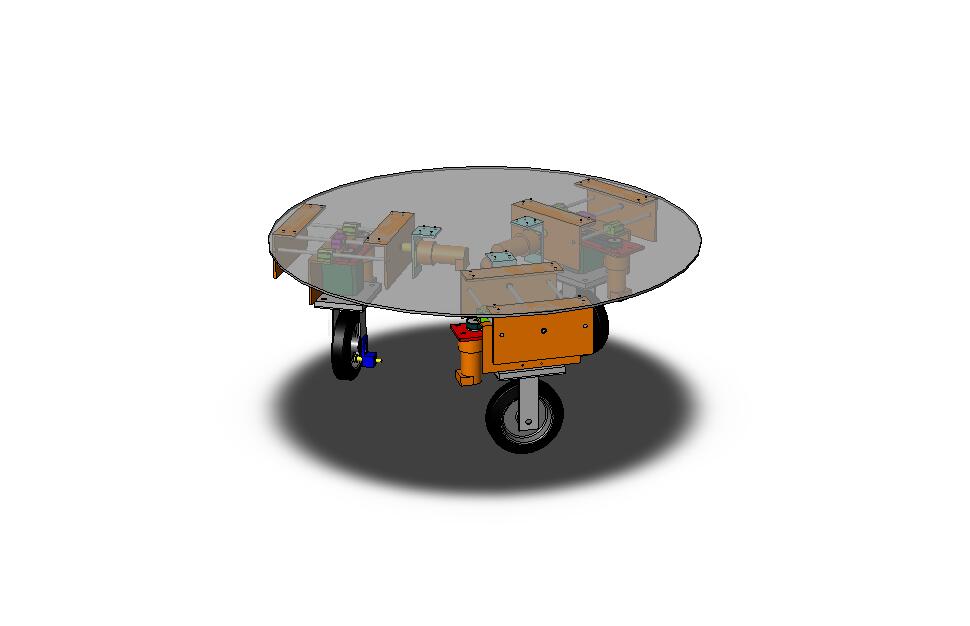
Bottom view of the glider robot
|
|
|
|
|
|
|
|

|
|
|
|
|
|
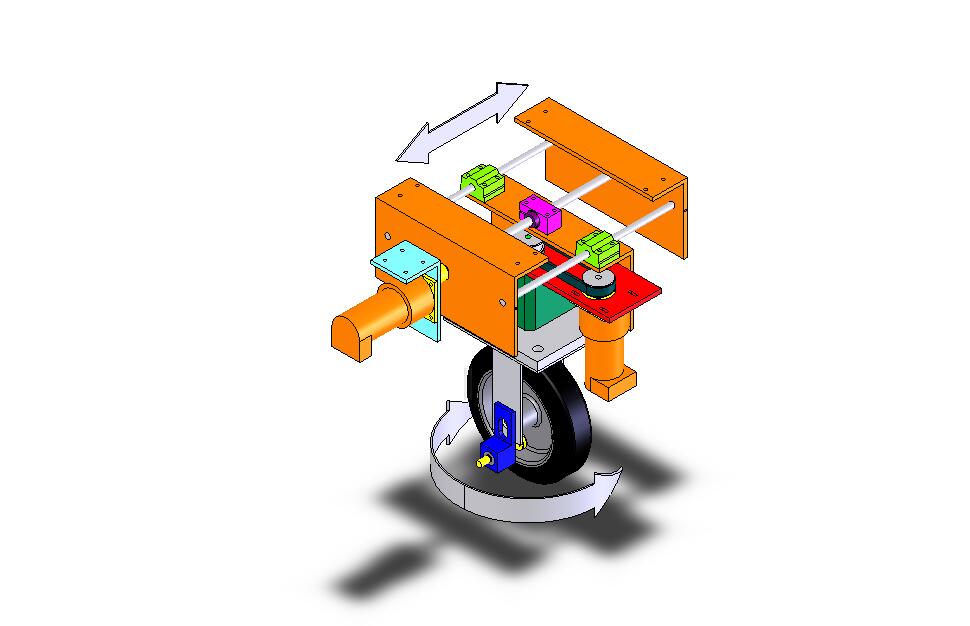
Drawing of the glider's robot wheel mechanism |
|
|
|
|
|
|